Project: Root Detection
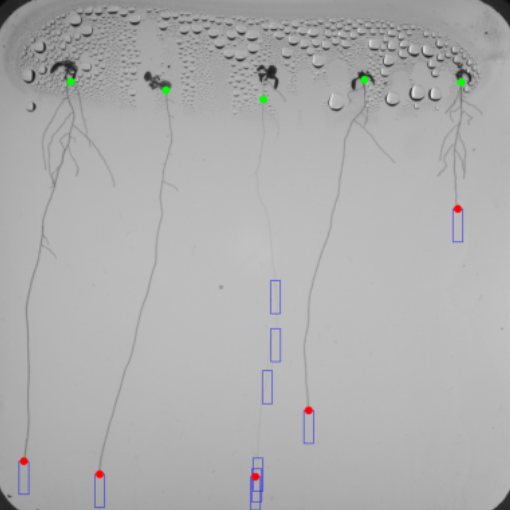
The project aimed to design and implement a complete pipeline for root detection and precision inoculation in Petri dish experiments. The first stage focused on image segmentation of Petri dish images to identify and localize plant roots. This was approached using both deep learning and traditional computer vision methods. A U-Net–based convolutional neural network was developed and trained to achieve accurate segmentation, while classical image processing techniques were used for precise root tip identification.
The segmentation outputs were then translated into actionable coordinates and instructions for the Opentrons OT-2 robotic platform, enabling automated precision inoculation directly onto root structures. To optimize the control of the inoculation process, two strategies were developed and compared: a PID controller and a reinforcement learning controller.
Skills:
- Computer vision
- Reinforcement learning
- Weights & Biases
- Hyperparameter tuning